Fault Tolerant Control for UAVs
Published:
This project focuses on fault-tolerant control algorithms for UAVs with rotor failures, such as multicopter, bi-copter, helicopter, or other kinds of UAVs. Actuator failure is a severe fault, and it can easily result in an aircraft crash.
This study aims to challenge the control problems of those UAVs with rotor failure. By abandoning the yaw channel with careful controller design, the fault-tolerant ability of some kinds of UAVs is achieved by falling into spinning around the yaw for those who suffer from the failures.
NMPC-based FTC for Quadcopters
The relaxed hover solution for a quadcopter has been validated, proving that control of the averaged position is possible. A Nonlinear Model Predictive Control (NMPC) based fault-tolerant control algorithm is employed to challenge those problems.This algorithm is first demonstrated on a quadcopter with one rotor failure. Benefiting from state-predictive ability, NMPC could obtain an almost optimal motion mode for the quadcopter. Intuitively, driven by NMPC, the quadcopter would fall into spinning as long as it has a suitable objective function and weight, such as keeping the weight of position errors bigger than the yaw rate error.Based on the scheme, an HIL simulation is performed to validate this algorithm. The actuator fault is injected by setting its maximum thrust to zero. The simulation result is shown below. The quadcopter falls into spinning autonomously, and its position is controllable.
Then, the real flight experiment was carried out. Those simulations and experiments prove that the NMPC-based fault-tolerant control algorithm is effective.
Relaxed Hover Solution based FTC for Bi-copters
As the usage of bi-copters increases in military and civilian fields, the demand for reliable bi-copters is on the rise. This study focuses on controlling a bi-copter under rotor or servo stuck failure. A relaxed hover solution is derived for the bi-copter, by solving an optimization problem subject to rotor and servo stuck failures. The solution is used for designing a reduced attitude controller based on linear quadratic regulator (LQR). To ensure hover capability, we introduce a position controller based on a cascaded-PID. The numerical simulations are conducted to demonstrate that position control is possible, even with complete rotor or servo stuck failure, by driving the bi-copter into relaxed hover state through the abandonment of the yaw channel. Meanwhile, the FTC scheme is examined under constant wind disturbances and uncertainties in the rotational damping parameters.
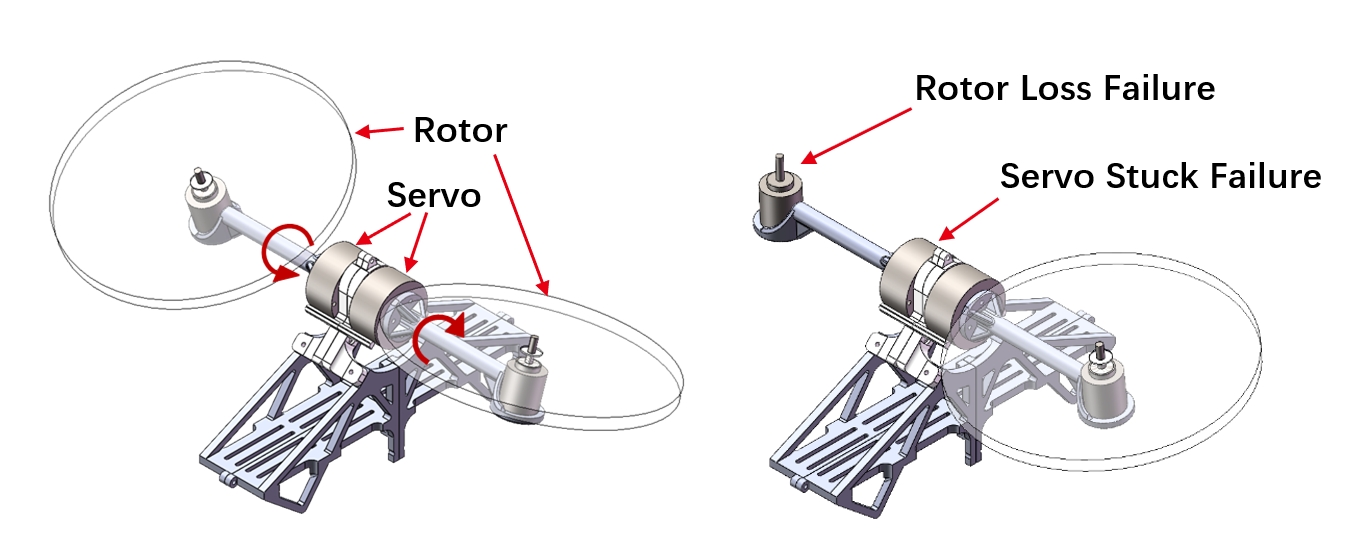
Haixin Zhao, Ruifeng Li, Quan Quan*. Relaxed Hover Solution Based Control for a Bi-copter with Rotor and Servo Stuck Failure [C]. 2024 IEEE International Conference on Robotics and Automation (ICRA)(Accepted)
Future Work
Some new general problems have arisen by analyzing the principle of those vehicles’ fault-tolerant control phenomena. How to design a controller for a rigid body with some actuators in different placements, driven by the controller, the vehicle could be controlled by position command. However, it does not seem to be a familiar vehicle for people. Moreover, how to design a new vehicle endowed with better controllability?How does the NMPC-based approach relate to the relaxed hover solution-based approach?