Connecting System Identification and High Performance Control System Design for Quadcopters
Published:
This work aims to model the angular velocity channels of the quadcopters via system identification. Based on the identification results, a new control scheme is proposed to improve the performance of a closed-loop system.
Most textbooks present the system model directly to design a control system with a SISO linear system, such as the state space model or transfer function. However, during the actual experiments, the system models are sometimes unavailable.
This study bridges the actual system and computer-based control system designs. It provides a feasible scheme for acquiring the SISO linear system. Now, we can touch the real world and feel it.
Highlight
The frequency response data was obtained by frequency sweeping, and the frequency range that can be identified as a linear system was analyzed by coherence function. Step angular velocity response tests were performed to demonstrate the effectiveness of the identification results.
Considering the system’s characteristics, including disturbance, time delay, and resonance, a new disturbance observer based control scheme was introduced, combining time delay compensation and notch filter.
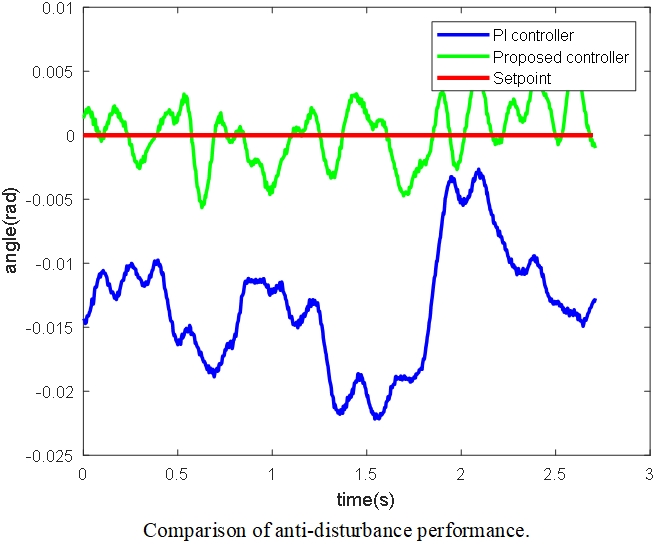
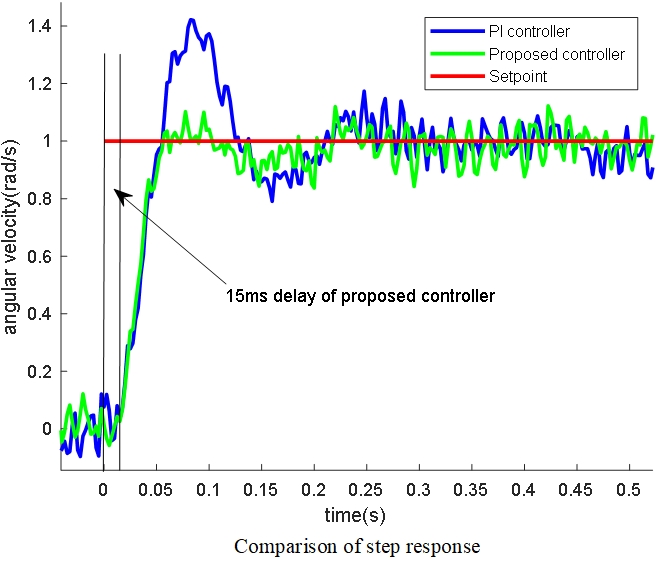
Undering the torque disturbance with 0.17N · m, the proposed controller demonstrated almost zero error. Compared with a well-tuned PID controller, 30% overshoot was reduced with the same raising time.
Result

This study performs the system identification procedure during hovering, which significantly reduces the disturbance suffered by the quadcopters. Simultaneously, high-quality sensor signals that benefit from this scheme could be obtained.
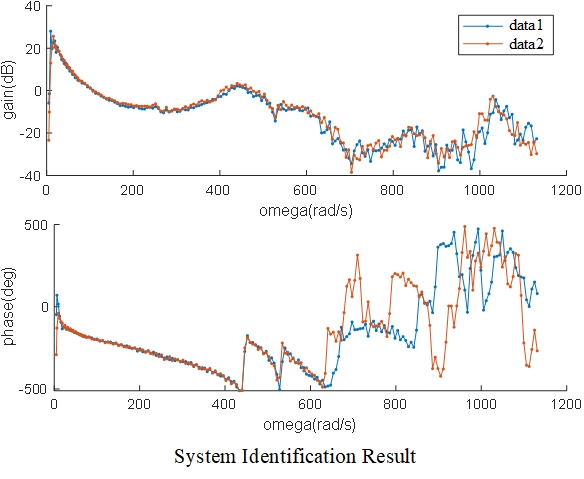
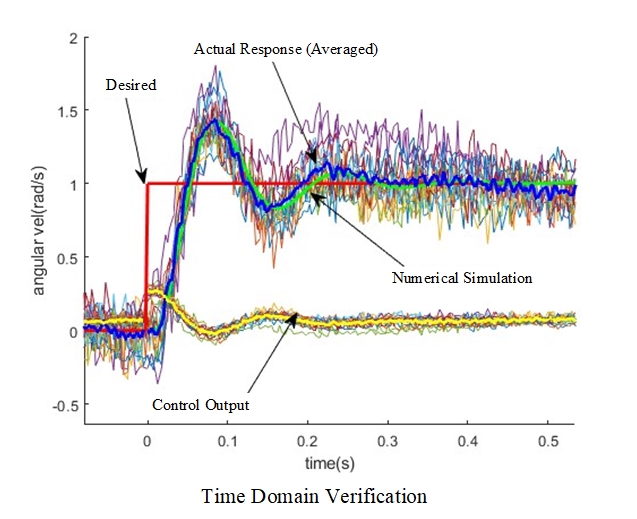
Frequency response data is acquired by feeding sinestream to the closed-loop system, the frequency range is arranged within 1Hz-180Hz, and the actual system features by disturbance, time-delay, and resonance. After data preprocessing via a band-pass filter, a system identification toolbox is adopted to acquire the transfer function. Angular velocity step response experiment is performed simultaneously. After comparing numerical simulation and actual response (shown as follows), it demonstrates the effectiveness of the identified transfer function.
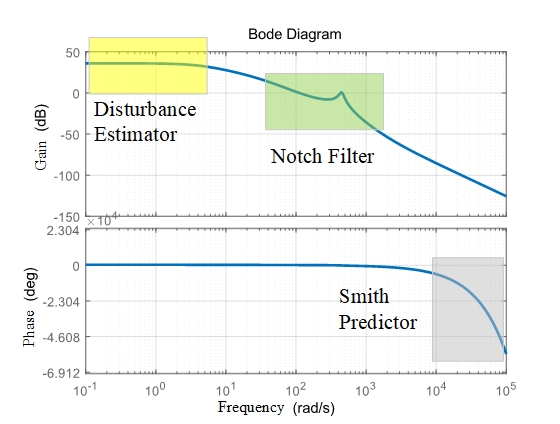
According to the Bode diagram (shown as follows), the gain curve in the low-frequency range can not continue at a rate of -20 dB/dec due to disturbance. The gain curve rolls faster with the frequency increase when the frequency is over the bandwidth of the actuator. Besides, a resonance peak is observed, which may caused by the structure’s flexible mode. Meanwhile, the phase curve decreases with frequency increasing due to the time delay, which could be compensated by the Smith predictor. Disturbance Observer Based Control(DOBC) frame is introduced to reject disturbances. A new control frame is proposed, combined with DOBC, notch filter, and Smith predictor.
The performance of the controller is demonstrated by real flight. According to the comparisons(illustrated below), a better disturbance rejects performance, and less overshoot performance is drawn.